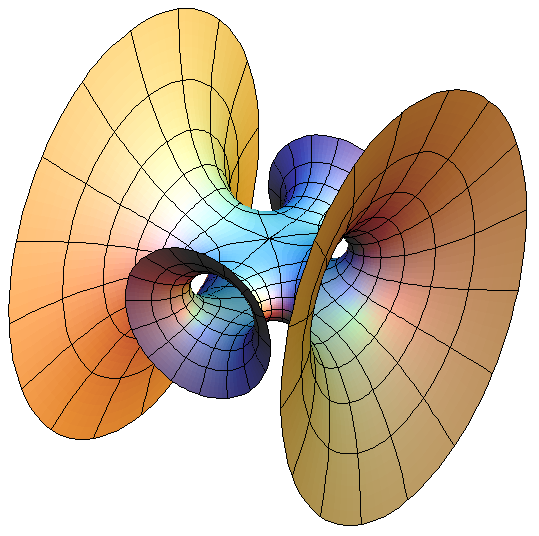
About the Symmetric 4-Noid
H. Karcher
The symmetric and skew 4-noids are parametrized by
4-punctured spheres; we use lines which extend polar coordinates
around the punctures. Formulas are from [K2].
The intersection of the two families is the 4-noid from the
Jorge-Meeks family of k-noids. These k-noids are the first
finite total curvature immersions where the Weierstrass data
were manufactured to fit a previously conceived qualitative
global picture of the surfaces.
In these examples aa controls the angle between the ends, and
should be kept in the range 0 ≺ aa ≺ 0.9, (aa=0 gives a symmetric
4-noid). In the symmetric case, bb determinses the size of the
catenoid ends.
We suggest morphing the relative size of the opposite pairs
of catenoid ends in the symmetric case and the angle between
the catenoid ends in the skew case. The skew surface family
goes from the Jorge-Meeks 4-noid to surfaces which look like
two catenoids joined by a handle. This convinced David Hoffman
that the idea of adding handles might be promising.
[K2] H. Karcher, Construction of minimal surfaces, in "Surveys in
Geometry", Univ. of Tokyo, 1989, and Lecture Notes No. 12,
SFB 256, Bonn, 1989, pp. 1--96.
For a discussion of techniques for creating minimal surfaces with
various qualitative features by appropriate choices of Weierstrass
data, see either [KWH], or pages 192--217 of [DHKW].
[KWH] H. Karcher, F. Wei, and D. Hoffman, The genus one helicoid, and
the minimal surfaces that led to its discovery, in "Global Analysis
in Modern Mathematics, A Symposium in Honor of Richard Palais'
Sixtieth Birthday", K. Uhlenbeck Editor, Publish or Perish Press, 1993
[DHKW] U. Dierkes, S. Hildebrand, A. Kuster, and O. Wohlrab,
Minimal Surfaces I, Grundlehren der math. Wiss. v. 295
Springer-Verlag, 1991