Wallpaper groups: 2. Theorems on Rotation and Translation
Theorem: characterization by two points
Two points P, Q and their image P', Q' uniquely defines a transformation.
- Proof: Rotation has one fixed point, translation has none.
- Suppose motion m1 and motion m2 both maps P to P' and Q to Q'.
- Then the motion m1*m2^-1 has at least two fixed point P and Q, but no motion can have two fixed points, thus the assumption cannot be true.
- End of proof.
Think about the action of translation or rotation on two points for a moment. It is obvious that two different transformations can not transform two points the same way.
Theorem: closure of rotation and translation
- Suppose {t1, t2, …, tn} is a sequence of transformations, where each element is a rotation or translation.
- The action of this sequence is equivalent to one of the following: A single rotation; a single translation; identity.
- Proof: Pick any two distinct points P, Q, and let P', Q' be their image.
- We know that distance[P,Q]==distance[P',Q'] because rotation and translation are distance preserving.
- If P==P' or Q==Q', then we have a rotation around P or Q respectively.
- If If P==P' and Q==Q', we have the identity.
- Now suppose P≠P' and Q≠Q'.
- If distance[P,P']==distance[Q,Q'], then it is a translation since translation moves every point to the same distance.
- If distance[P,P']≠distance[Q,Q'], then it is a rotation.
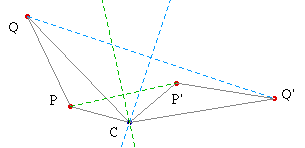
- Let C be the intersection of: (1) The bisector of PP' (2) the bisector of QQ'.
- We show that C is the center of rotation taking P to P' and Q to Q'.
- It suffice to show that the triangle PQC and P'Q'C are congruent.
- Two triangles are congruent iff there is a pairing of equal length sides.
- This is satisfied because we have distance[P,Q]==distance[P',Q'] (distance preserving transform), distance[P,C]==distance[P',C], and distance[Q,C]==distance[Q',C] (by construction).
- End of proof.
- In the above proof, we have assumed that multiple rotations and translations do not lead to transformations other than rotation or translation.
- This can be proved by showing that rotation and translation are the only distance-preserving and sense-preserving transformations, and such property cannot be lost.
Theorem: product of two rotations
- The product of two rotations centerd on A and B with angles α and β is equal to a rotation centered on C, where C is the intersection of:
- (1) line AB rotated around A by -α/2.
- (2) line AB rotated around B by β/2.
- (if α+β==0, then its a translation. Proved above.)
- Proof: Let's denote the rotation by A as r[A,α] and the rotation by B as r[B,β].
- By the previous theorem, we know that the new rotation center C of 2 given rotations is Intersect[LineBisect[P,P'],LineBisect[Q,Q']], where P' is the image of a point P, and Q' is the image of Q (assuming P≠Q).
- Now, let P := A, so that P' == r[B,β][A] since A rotated around itself is itself, and let Q be r[A,-α][B], so that Q' == B, since after the first rotation Q coincides with B, and rotating around itself doesn't change.
- Now, the bisector of segment[P,P'] is just A rotated around B by β/2, due to our choice of P.
- The bisector of segment[Q,Q'] is just B rotated around A by -α/2, due to our choice of Q.
- End of proof.
This could also be proven easily with analytic geometry.
Theorem: parallel lines and angle of rotation
- Under a rotation, the angle formed by any line m and its image m' is the angle of the rotation.
- Proof: If a line n passes the center of rotation, then by definition angle[n,n'] is the angle of the rotation.
- For any line m, there is a parallel line n that passes the center of rotation.
- Rotation transform parallel lines to parallel lines.
- We have m parallel to n and m' parallel to n'.
- Since two sets of parallel lines intersects at the same angle, thus angle[n,n']==angle[m,m'].
- End of proof.
- Note: Two lines forms four distinct angles: α, π-α, -α, -(π-α).
- You may workout the details how the theorem and proof applies
Theorem: rotation angle additivity
- A rotation through angle α and another through angle β is equal to a single rotation with angle α+β.
- If α+β==0 then it is a translation or identity.
- It is a translation if centers of rotation are distinct, else identity.
- Proof: This theorem follows from the theorem of Parallel Lines and Angle of Rotation, the rotation angle is the intesection of a line and its image.
- Pick a line m.
- We have its image m', and its image m'' after two rotations.
- m and m' intersect at A with angle α.
- m' and m'' intersect at B with angle β.
- We want to know the intersection of m and m''.
- Translation of m'' from B to A preserves all the angles.
- The angle of intersection of m and m'' is the sum of α and β.
- End of Proof.
Exercise
- Use analytic geometry to prove the rotation product theorem.
- Find the product r[{a1,a2},α]*t[{v1,v2}] in terms of their parameters. Likewise for t[{v1,v2}]*r[{a1,a2},α] and r[{a1,a2},α]*r[{b1,b2},β].
- Suppose α+β≠0, then r[A,α]*r[B,β]==r[C,γ]. Consider the transformation t:R^2→R^2 defined as t[X]:= r[A,α]*r[X,β], where α and β are constants and A is a fixed point. What kind of transformation is t? (hint: rotation product theorem is the key)
Some Formulas
The product of a rotation followed by a translation:
r[{x, y}, α]*t[{a,b}] ==
r[{1/2*(a + 2*x - b*Cot[α/2]),
1/2*(b + 2*y + a*Cot[α/2])}, α]
The product of a translation followed by a rotation:
t[{a,b}]*r[{x, y}, α] ==
r[{-(a/2) + x - 1/2*b*Cot[α/2],
-(b/2) + y + 1/2*a*Cot[α/2]}, α]
The product of two rotations (α+β ≠ 0):
r[{a1, a2}, α]*r[{b1, b2}, β] ==
r[{1/2*Csc[(α + β)/2]*
((-a2 + b2)*Cos[(α - β)/2] +
(a2 - b2)*Cos[(α + β)/2] +
a1*Sin[(α - β)/2] -
b1*Sin[(α - β)/2] +
a1*Sin[(α + β)/2] +
b1*Sin[(α + β)/2]),
1/2*Csc[(α + β)/2]*
((a1 - b1)*Cos[(α - β)/2] +
(-a1 + b1)*Cos[(α + β)/2] +
a2*Sin[(α - β)/2] -
b2*Sin[(α - β)/2] +
a2*Sin[(α + β)/2] +
b2*Sin[(α + β)/2])},
α + β]