Transformations: Scaling, Moving, Rotating a Curve
Vectors
A point {a,b} has a distance to the origin. Also, it makes a angle with the positive x-axis if we consider the line {0,0} to {a,b}. These two concepts are very useful and convenient, that we define the length of a point to be the distance from the origin to the point, and we define the angle of a point to be the angle it makes with the positive x-axis. When a point is considered this way, we call it a vector. We say, that a vector has a length, and a angle.
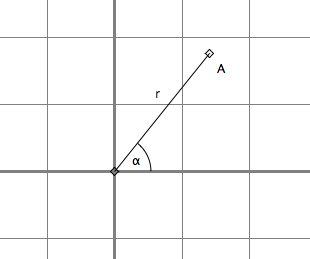
If a point A has coordinates {a,b}, its length can be expressed as Sqrt[a^2+b^2]. This comes easily from
Pythagorean theorem.
The angle of a vector {a,b} is ArcTan[b/a]. This is from trigonometry
.
Scaling a Vector
Given a vector {a,b}, to scale (dilate/contract) the vector by s around the origin, the new vector is {a,b}*s.
Scaling a Curve
Let
f[x,y]==0
be the equation for a curve in rectangular coordinates.
To scale the curve by s, the new equation would be:
f[x/s, y/s]==0
Let
f[θ,r]==0
be the equation for a curve in polar coordinate.
To scale it by s, the new formula is
f[r/s,θ]==0.
Let
{f[t],g[t]}
be the parametric formula for a curve in rectangular coordinate.
To scale it by s, the new formula is
{f[t],g[t]}*s.
Let
{r[t],φ[θ]}
be the parametric formula for a curve in polar coordinate.
To scale it by s, the new formula is
{r[t]*s,φ[θ]}.
Example
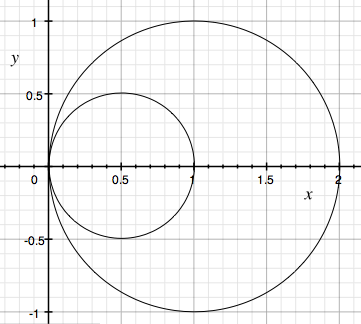
A circle (x-1)^2+y^2-1==0 has center {1,0} and radius 1. To scale it by a factor of 1/2, we replace x by 2*x and y by 2*y, to obtain
(2*x-1)^2+(2*y)^2-1==0.
Translate a Vector
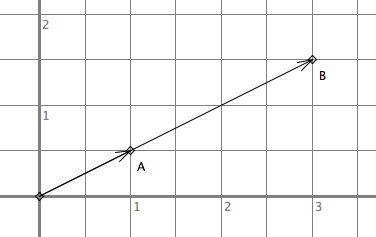
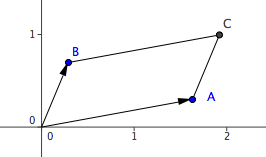
Given a vector {a,b}, to translate the vector by {c,d}, the new vector is {a+c,b+d}.
The adding of coordinate components is a very convenient operation. We define it as vector addition. That is, {a,b}+{c,d} := {a+c,b+d}, and its geometric interpretation is that one vector is moved to a new position by the second vector.
Translate a Curve
Let
f[x,y]==0
be the equation for a curve in rectangular coordinates.
To translate the curve by vector {a,b}, the new equation would be:
f[x-a, y-b]==0.
Let
{f[t],g[t]}
be the parametric formula for a curve in rectangular coordinate.
To translate it by vector {a,b}, the new formula is
{f[t],g[t]} + {a,b}